Scientists Have Created Robo-Skin Mimicking Human Neuro Architecture
Har Devarukhkar - Aug 18, 2019
Researchers from Singapore reveal ACES - a new robotic skin model that allows robots to almost immediately respond to external stimulations.
- This Robotic Gripper Wraps Around Objects Like An Elephant Trunk
- Toyota Is Building A High Tech City Where AI, Robots, And Humans Live Alongside Each Other
- Bengaluru Students Are Enjoying Robotics Classes At Schools, Other Schools In Inda Shoud Follow
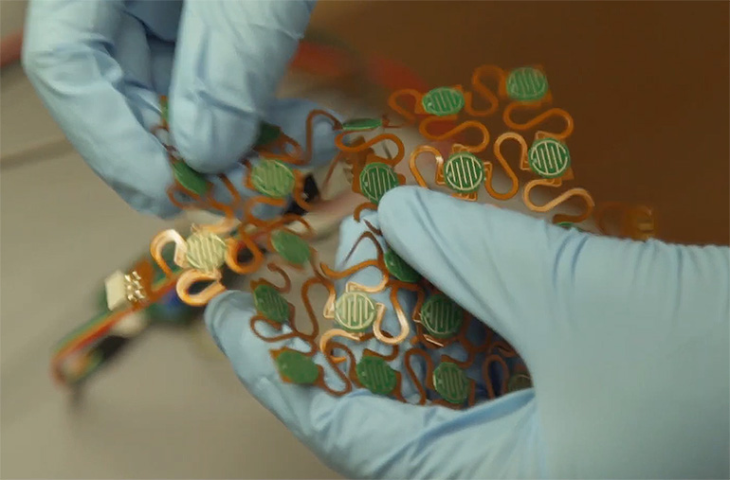
A research team from Singapore announced that they have successfully created a type of electronic skin that gives robots the ability to sense pressure, temperature as well as sudden unintended movements from objects in contact.
Present models of robotic skin struggle with data processing problems. Input information is decoded serially and periodically, creating a 2D map of changing pressure inputs. This approach is called time-divisional multiple access, or TDMA for short.
This method results in substantial “latency,” which is the delay time between the receipt of stimuli and its corresponding response. In addition, when more sensors are integrated into the system of the artificial skin for higher accuracy, input information will be blocked up due to the slow processing speed, creating a processing bottleneck.
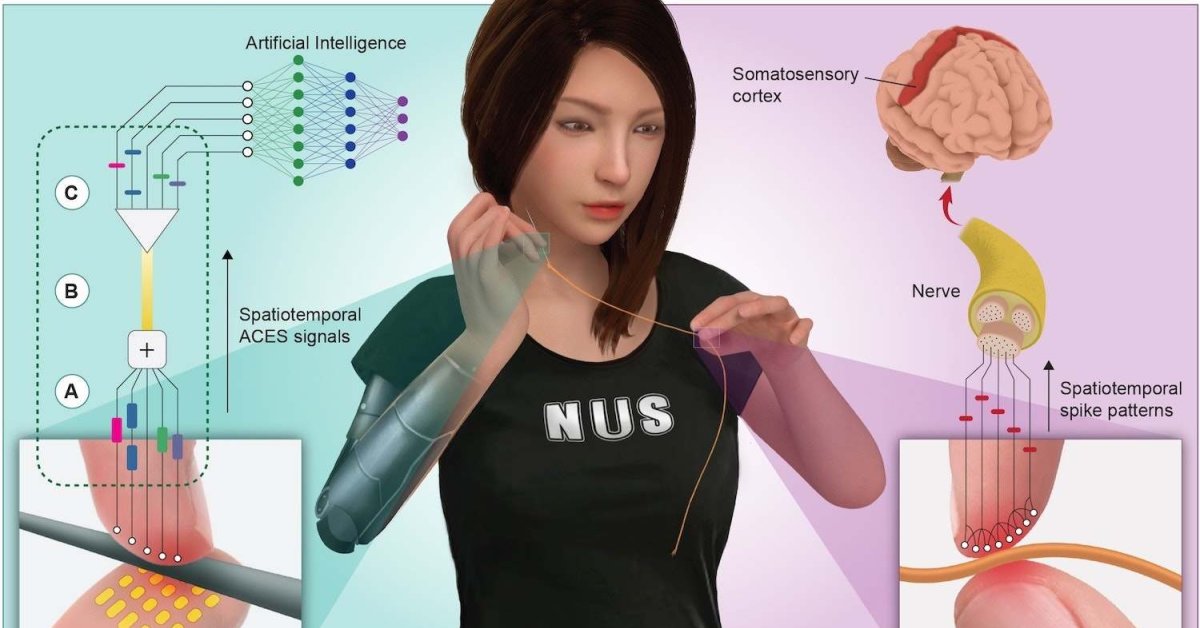
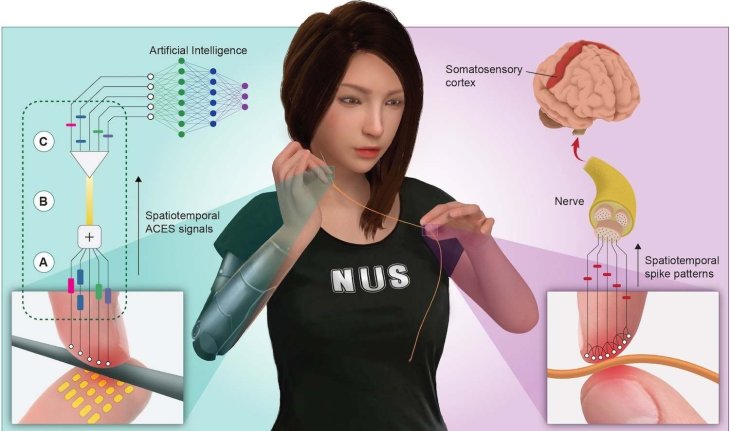
To solve this information-processing issue, Wang Wei Lee along with other scientists from the National University of Singapore (NUS) invented ACES, which stands for Asynchronously Coded Electronic Skin. The research team promised that for robots, this new electronic skin should:


Wang Wei Lee had shared on the Science Robotics that the model created by his team relies on a different set of engineering protocols. Lee asserted that with “neuromagnetic architecture”, this new e-skin should be able to deal with more than 10,000 sensors.
The paper included a proof-of-concept which indicated one electrical conductor could provide power for up to 240 mechanical receptors to carry out their operation. The latency of this system is also reduced considerably to only a millisecond, which, in the scientists’ opinion, is enough to solve the “fine spatiotemporal features necessary for rapid tactile perception.”
Unlike the TDMA system, sensors in ACES models function independently. Responding to stimuli, each sensor will send a sequence of electrical pulses to a CPU. The pulses generate a signature by which a decoder unit at the receiving end can identify transmitting sensors.
The independence between sensors in the new e-skin holds great importance, according to Lee and his teammates. Because sensors work asynchronously, localized damages will only affect one or a group of sensors instead of the whole sensory system of artificial skin.
In reality, this property may come in handy in many situations in the real world. For instance, in industries, damages to the robotic skin due to careless handling of packages may tear or deform the part of the skin in contact, but the sensory system will still remain fully functional.
Despite such a remarkable advantage, ACES has not been applied on an industrial level. The research team acknowledges that this new model will need a lot more computational power than the previous TDMA system in order for the decoding units to work properly.
In research, the power usage rate of the ACES prototypes was similar to that of the TDMA models. However, Lee and his team speculated that this feature will be improved.
The research team shared on the journal Science Robotics:

Featured Stories

Features - Mar 24, 2026
How to Use GeForce NOW to Play Video Games Without Actual Hardware

Features - Jan 29, 2026
Permanently Deleting Your Instagram Account: A Complete Step-by-Step Tutorial

Features - Jul 01, 2025
What Are The Fastest Passenger Vehicles Ever Created?

Features - Jun 25, 2025
Japan Hydrogen Breakthrough: Scientists Crack the Clean Energy Code with...

ICT News - Jun 25, 2025
AI Intimidation Tactics: CEOs Turn Flawed Technology Into Employee Fear Machine

Review - Jun 25, 2025
Windows 11 Problems: Is Microsoft's "Best" OS Actually Getting Worse?

Features - Jun 22, 2025
Telegram Founder Pavel Durov Plans to Split $14 Billion Fortune Among 106 Children

ICT News - Jun 22, 2025
Neuralink Telepathy Chip Enables Quadriplegic Rob Greiner to Control Games with...

Features - Jun 21, 2025
This Over $100 Bottle Has Nothing But Fresh Air Inside

Features - Jun 18, 2025
Comments
Sort by Newest | Popular